در این شکل یک مدل کامپیوتری، رباتی تحت عنوان میکروشناگر را در حال سوراخ کردن پلاک نشان میدهد. پلاک نوعی ماده چربی است که بر روی دیواره شریانهای برخی افراد به صورت رسوب دیده میشود.تعداد زیاد پلاک میتواند شریانها را مسدود کرده و منجر به حمله قلبی گردد. این میکرورباتها به سختی با چشم انسان قابل تشخیص بوده و تقریبا به اندازه ذرات گرد و غبار میباشند. (Min Jun Kim)
یک دستگاه میکروسکوپی در نظر بگیرید که میتواند در مسیر رساندن دارو به تومور سرطانی، در داخل عروق فرد شنا کند؛ یا دستگاهی که شریان مسدود شده را به منظور پیشگیری از حمله قلبی باز میکند یا حتی دستگاهی که میتواند جراحیهای ظریف داخل چشمی انجام دهد. این شاهکارها در عرصه پزشکی هنوز امکانپذیر نشدهاند؛ اما محققان در حال طراحی رباتهای مینیاتوری تحت عنوان رباتهای شناگر بوده که در آینده نزدیک این اهداف و اهداف مشابه بسیاری را ممکن خواهند ساخت.
یک ربات را تصور کنید؛ شاید R2-D2 در جنگ ستارگان یا همتای آن، C-3PO، به ذهنتان خطور کند. رباتهایی که دانشمندان در حال تلاش برای واردسازی آنها به بدن هستند، بسیار کوچکتر از اینها میباشند. آنها در حالت کلی اندازهای کمتر از یک میلیمتر یا ۰.۰۴ اینچ دارند. بزرگترین آنها احتمالا به اندازه چندین دانه نمک باشد. حتی کوچکتر نیز میتوانند باشند؛ به قدری کوچک که فقط با میکروسکوپ بتوان آنها را مشاهده کرد.
بدن انسان بیشتر از مایعات ساخته شده است. خون، مایع مغزی-نخاعی و دیگر مایعات ۶۰ تا ۶۵ درصد حجم بدن انسان را تشکیل میدهند. پس برای عبور آسان از این محیطها، رباتها بایستی شنا کنند. یافتن بهترین مواد و طرحها برای ساخت این رباتهای شناگر به منظور عبور آنها از کوچکترین رگهای بدن بسیار دشوار است؛ اما غیر ممکن نیست. در حقیقت، دانشمندان از دهه گذشته بر روی این ایده اندیشیدهاند.
David Capilleri، میکرورباتیسیست دانشگاه Purdue در شهر لافایت ایالت ایندیانا، بیان میکند:
نتیجه باید ارزش این همه انتظار را داشته باشد. میکرورباتها میتوانند به محلهایی دسترسی پیدا کنند که رباتها نمیتوانند. آنها میتوانند ابزارهایی با دقت بسیار بالاتر به کار برند.
به گفته Bradley Nelson، روبوتیسیست موسسه تکنولوژی فدرال سوئیس در زوریخ، انسان در زمینه حرکت دادن مواد در میکرومحیط های بدن کارایی کافی ندارد؛ اما برخی موجودات زنده این کار را به خوبی انجام میدهند. از این رو نلسون و دیگر طراحان ربات در صدد الهام گرفتن از این موجودات هستند.
تقلید از میکروشناگرهای طبیعت
قبل از این که دانشمندان بتوانند رباتهای دارای قابلیت شنا در داخل بدن بسازند، مجبور بودند ابتدا مشکل مقیاس و اندازه را حل کنند. فیزیک شنا با کوچکتر شدن شی تغییر میکند. افرایش ویسکوزیته یا گرانروی مایعات در مقیاس میکروسکوپی نیز به همین دلیل است.
بنا به توضیح نلسون، در صورتی که انسان به اندازه میکروربات کوچک شده و به استخر بپرد، آب مانند آب معمولی نخواهد بود. در این حالت، آب شباهت زیادی به عسل خواهد داشت. بدان دلیل است که او و دیگر دانشمندان از تعدادی از ریزترین شناگران طبیعت تقلید کردهاند:
موجودات زنده تک سلولی که انسان را آلوده کرده و با سرعت بالایی در بدن شنا میکنند.

پروتوزوا (به رنگ بنفش تیره) در میان سلولهای خونی (به رنگ بنفش روشن) شنا میکند. طرح میکرو ربات Bradley Nelson از میکروبهای تریپانوزوما بروسی (Trypanosoma brucei) که عامل ایجاد بیماری خواب آفریقایی هستند، گرفته شده است.
برای طراحی میکروربات، نلسون بر روی نوعی میکروب تحت عنوان پروتوزوئن تمرکز کرده و گونه تریپانوزوما بروسی را انتخاب کرد. این انگل بیماری خواب آفریقایی را در انسان ایجاد میکند. افراد آلوده غالبا شبها نمیتوانند بخوابند ولی در طول روز همواره خوابآلودند. این گونه توسط دم شلاق مانند خود به نام فلاژل در جریان خون انسان شنا میکند. T.brucei حین حرکت شکل خود را نیز تغییر داده و این تغییر شکل به جابجایی انگل از بخشی از بدن به بخش دیگر کمک میکند. در نتیجه، شکل پروتوزوئن از کوتاه و پهن تا نازک و سوزنی متغیر بوده و به آن امکان گذر از دیواره عروق خونی و حمله به نخاع را میدهد.
نلسون نظریه ساخت میکرورباتی با چنین توانایی تغییر شکل را مطرح کرد. چنین رباتی میتواند در بخشهای مختلف بدن وظایف متفاوتی بسته به شکل خود انجام دهد. به توضیح او، این وظایف شامل باز کردن شریانهای مسدودشده یا تحویل دارو به بافت هدف خواهد بود؛ و یا ربات قابلیت ترمیم عروق چشم را خواهد داشت.
نلسون از مادهای ژل مانند برای ساخت میکرورباتی انعطافپذیر بهره جست و با تغییر دمای ژل توانست ربات خود را به صورت کوتاه و پهن یا دراز و سوزنی درآورد. او این طرح را سال گذشته در مجله ارتباطات طبیعت توضیح داد.
قراردهی رباتهای کوچک در داخل بدن

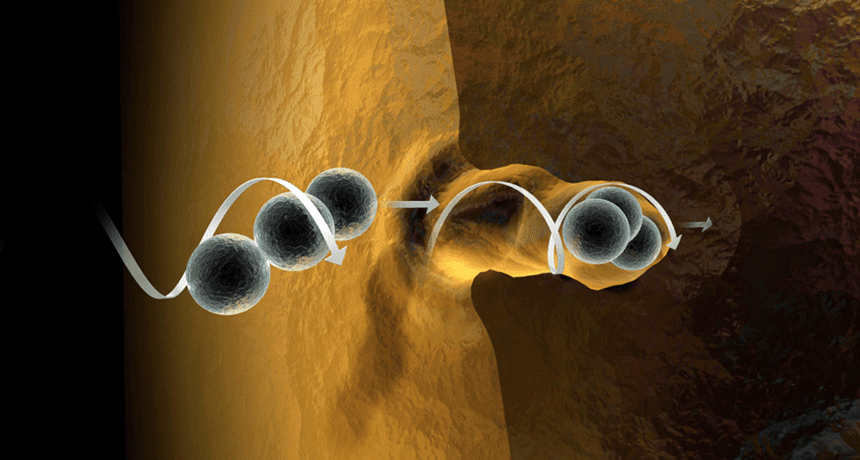
مین جون کیم و همکارانش طرح ربات میکروشناگر خود را از روی بورلیا بورگدورفری(Borrelia burgdorferi)، مارپیچهای سفید شکل بالا، تقلید کردند.
میکروشناگر نلسون تنها نانوابزار پزشکی در حال ساخت توسط محققان نیست. برخی محققان در دانشگاه Drexel شهر فیلادلفیا در ایالت پنسیلوانیا، نوع متفاوتی از این رباتها را به منظور رساندن داروهای ضدسرطان به تومورها ایجاد کردند.
یکی از چالشهای روبرو در طراحی رباتهایی که داخل بدن میروند، تامین انرژی آنهاست. این رباتها برای حمل موتور یا باتری بسیار کوچک میباشند. کیم، سرپرست تیم Drexel، مهندس مکانیک میباشد. مهندسان مکانیک در طراحی و ساخت ماشینها از قوانین حرکت، انرژی و نیرو استفاده میکنند. تیم کیم برای حل این مشکل از آهنربا استفاده کرد. برخلاف میکروشناگر انعطافپذیر نلسون، طرح کیم کاملا از فلز ساخته شده است. او به جستجوی طرح مدنظر خود در میان باکتریها پرداخت و آن را در بورلیا بورگدورفری (Borrelia burgdorferi) یافت. این میکروب مارپیچی باعث بیماری لایم در انسان میشود. افراد با نیش کنه آلوده به این بیماری مبتلا میشوند. این باکتری از نوعی حرکت مارپیچی برای شنا و نفوذ به بافت استفاده میکند.
کیم با اتصال رشتهها و مهرههای آهنربایی به یکدیگر از شکل مارپیچی باکتری تقلید کرد. این مهرهها در حدی کوچک هستند که به سختی بدون میکروسکوپ دیده میشوند.
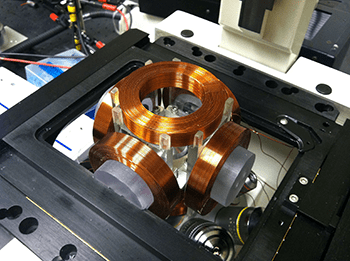
دانشمندان دانشگاه Drexel با استفاده از سه فنر الکترومغناطیسی محیطهای الترومغناطیس ایجاد کردند. با دستکاری این محیطها، آنها میتوانند سرعت یا جهت میکروشناگر را تغییر دهند. (UKei Cheang)
او از آهنرباها برای هدایت حرکت میکروربات خود در عروق مصنوعی موجود در ظرف پتری استفاده کرد. با افزایش یا کاهش نیروی آهنربا، کیم توانست سرعت شنای ربات را کم یا زیاد کند. تغییر دادن جهت محیط مغاطیسی به او این امکان را میدهد که ربات را به راست یا چپ هدایت کند. همچنین میتواند زنجیرههای متعدد را برای ساخت زنجیرههایی به طول ۲۰ تا ۳۰ مهره به یکدیگر متصل کند یا به صورت زنجیرههای ۳ مهرهای بشکند.
به گفته کیم، سطح این مهرهها میتواند با دارو پوشیده شود. برای درمان سرطان، یک میکروشناگر با زنجیره بلند میتواند به داخل یک تومور ضخیم نفوذ کرده و در داخل تومور به منظور انتشار داروی ضد سرطان اطراف خود، به زنجیرههای کوتاهتر شکسته شود.
تیم کیم این یافتهها را سال گذشته در مجله گزارشات علمی به اشتراک گذاشت.
چالشهای پیشرو
به گفته Zhang. Li، دانشجوی نانوتکنولوژی در دانشگاه هنگکنگ چین، برخی میکرورباتها میتوانند در ظروف پتری شنا کنند؛ اما برای آزاد کردن آنها در بدن افراد موانعی وجود دارد. دانشمندان بایستی بدانند این ذرات ریز تا چه حد برای بدن ایمن هستند. آنها همچنین باید بتوانند این ذرات را پس از انجام عملکرد از بدن حذف کنند.
در حال حاضر، محققان قصد دارند این تجهیزات میکروسکوپی را در حیواناتی همچون موش آزمایش کنند. این آزمایشات میتواند در تامین اطمینان خاطر آنها از غیرسمی بودن این مواد کمک کند. همچنین محققان میتوانند برای تمرین واردسازی، پیگیری و حذف این میکروشناگرها نیز از نمونههای حیوانی استفاده کنند. کار کردن با رباتها در بدن واقعی -موش یا انسان- بسیار متفاوت از این امر در ظروف پتری و زیر میکروسکوپ است. در این ظروف پوست، خون یا بافتهای دیگری برای ممانعت از دید وجود ندارد.
علیرغم این چالشها، دانشمندان بر این باورند که زمان زیادی برای عملی شدن این ایده باقی نمانده است.